
 产品:71
产品:71

机器人所有核心零部件中,减速机最为关键。
工业机器人成本结构大致如下:本体22%、伺服系统25%、减速器38%、控制系统10%以及其他5%。简单拆分国内6轴工业机器人成本(总成本25万元),可以看出减速器和伺服电机两项成本接近13万元,主要以进口为主。
今天小编就综合各方资料,为大家讲述下RV减速机。
一、RV减速机的机械原理
德国人劳伦兹·勃朗于1926年创造性地提出了一种少齿差行星传动机构,它是用外摆线作为齿廓曲线的,这就是最早期的针摆行星传动,由于两个啮合齿轮其中之一采用了针轮的形式,这种传动也被称做摆线针轮行星齿轮传动。
RV传动一种全新的传动方式,它是在传统针摆行星传动的基础上发展出来的,不仅克服了一般针摆传动的缺点,而且因为具有体积小、重量轻、传动比范围大、寿命长、精度保持稳定、效率高、传动平稳等一系列优点。
以RV-E型减速机为例
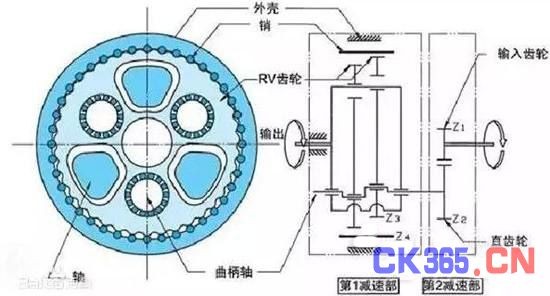
第1减速部 正齿轮减速机构
输入轴的旋转从输入齿轮传递到直齿轮,按齿数比进行减速。这是第一减速部。
第2减速部…差动齿轮减速机构
直齿轮与曲柄轴相连接,变为第二减速部的输入。在曲柄轴的偏心部分,通过滚动轴承安装RV齿轮。另外,在外壳内侧仅比RV齿轮数多一个的针齿,以同等的齿距排列。
如果固定外壳转动直齿轮,则RV齿轮由于曲柄轴的偏心运动也进行偏心运动。此时如果曲柄轴转动一周,则RV齿轮就会沿与曲柄轴相反的方向转动一个齿。这个转动被输出到第2减速部的轴。将轴固定时,外壳侧成为输出侧。